ESC 외의 웨이퍼를 고정시키는 방법이 궁금하시다면, 아래 글을 참조해주세요.
[반도체] Chuck의 종류 : 공정 중에 웨이퍼를 어떻게 고정할까?
공정 설비들 내부에 공정이 진행되기에 앞서, EFEM (또는 TM, Transfer Module)의 Robot이 웨이퍼를 공정이 진행되는 PM (Process Module)로 이송시키게 됩니다. PM 내부에서 공정이 진행될 때, 웨이퍼가 흔들리
teoengineering.tistory.com
Electrostatic Chuck(ESC)는 이름에서 유추할 수 있듯이, 정전기력을 기본 원리로 웨이퍼를 고정하는 방식입니다. 다시 말하면, Capacitor의 대전된 두 극판 사이에서 발생하는 인력을 가지고 웨이퍼를 고정하는 것입니다.
Chucking Force 식은 다음과 같습니다.
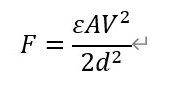
( ε: Dielectric Constant / d: Dielectric Thickness / V: Applied Voltage / A: Contact Area )
→ 이 F를 증가시키기 위해서는…
1) V인 전압을 증가시키거나, 2) d인 Insulating Layer의 두께를 줄이거나, 3) 𝜺인 유전율이 큰 물질을 사용하거나, 4) A인 웨이퍼 면적을 증가시키면 됩니다.
Chucking Force를 발생시키는 원리에 따라 Coulomb Type와 Johnsen-Rahbeck Type로 나뉩니다. (실제로는 두 힘 모두 존재하나, dominant한 힘에 따라 나누는 듯 합니다.)
Coulomb Type [Coulomb Force]
Coulomb Type의 메커니즘은 전극에 인가된 전압으로 형성된 Polarized Charge가 Chucking Force가 되는 것입니다. 따라서, 저항이 높은 dielectric 물질을 사용합니다.
장점
- Chucking Force의 Uniformity가 Johnsen-Rahbek에 비해 좋습니다.
- Dechucking 과정에서 ESC에 의한 Residual Charge로 인해 Crack이나 Sticking 등의 이슈가 발생하지 않습니다.
단점
- Chucking Force가 J-R Type에 비해 약해서 더 높은 전압을 필요로 합니다.
Johnsen-Rahbek Type [Johnsen-Rahbek Effect]
Johnsen-Rahbek Type의 메커니즘은 저항이 낮은 dielectric 물질을 통과한 누설 전류로 인해 표면의 비접촉 영역에 전하가 축적되어 Chucking Force가 발생하는 것입니다.
장점
- Air Gap 거리가 매우 가깝고 비접촉 영역이 대부분이기 때문에 Coulomb Force에 비해 Chucking Force가 비교적 셉니다.
단점
- 표면 상태에 민감하기 때문에 Chucking Force의 Uniformity가 떨어집니다.
- 사용하다보면 표면 마모가 생길 것인데, 이로 인해 Chucking Force에 큰 변화가 생기는 문제가 있습니다.
- Residual Charge로 인해 Dechucking 과정이 따로 필요합니다. 이로 인해 Issue가 발생할 수 있는 가능성이 증가하고, 공정 시간이 증가하게 됩니다.

ESC 디자인은 사용되는 전극의 개수에 따라 나눌 수 있습니다. 대표적으로는 Unipolar ESC와 Bipolar ESC가 사용됩니다. Tripolar, Multipolar ESC도 있다고 합니다.
Unipolar (Monopolar) ESC
Unipolar ESC는 하나의 전극을 사용하는 ESC입니다. 구조는 다음 그림과 같으며, 전극 역할을 하는 Chuck 위에 웨이퍼가 놓이게 됩니다.
장점
- 구조가 간단합니다
- 동일 조건에서 Bipolar에 비해 chucking force가 4배 강합니다.
단점
- 충분한 chucking force를 위해서 웨이퍼가 회로의 구성요소가 되어야 하기 때문에, 잔류 전하를 제거해줘야 합니다.
( 플라즈마 설비의 경우, 플라즈마가 그 역할을 대신하게 됩니다. )
- 웨이퍼에 전류가 흐르기 때문에 웨이퍼 fail 위험이 존재합니다.
Bipolar ESC
Bipolar ESC는 두 개의 전극을 사용하는 ESC입니다. 두개의 극판이 Insulator에 의해 분리되어 존재합니다.
장점
- 웨이퍼가 회로의 구성요소가 아닙니다
- 따라서, 웨이퍼에 유도되는 Net Charge가 없습니다.
단점
- 구조가 복잡합니다.
- 웨이퍼와 Chuck 사이 갭이 Clamping에 영향을 주기 때문에 Chuck Flatness가 중요합니다.
- 이론적으로 chucking force가 Unipolar의 1/4배입니다.
'반도체 > 설비' 카테고리의 다른 글
| [반도체 설비] MFC(Mass Flow Controller)란? (feat. SCCM, SLM 단위) (0) | 2024.12.17 |
|---|---|
| [반도체] 서브팹 (Sub Fab)이 무엇인가요? (0) | 2024.12.13 |
| [반도체] Chuck의 종류 : 공정 중에 웨이퍼를 어떻게 고정할까? (0) | 2024.11.25 |
| [반도체] 클린룸, FAB, Class란 무엇인가? (0) | 2024.11.24 |
| [반도체] 물류 자동화 시스템 OHT, Stocker (1) | 2024.11.21 |